| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- Absolute
- AGI
- ai
- AI agents
- AI engineer
- AI researcher
- ajax
- algorithm
- Algorithms
- aliases
- Array 객체
- ASI
- bayes' theorem
- Bit
- Blur
- BOM
- bootstrap
- canva
- challenges
- ChatGPT
- Today
- In Total
A Joyful AI Research Journey🌳😊
[45] 230303 Ch. 5 라즈베리파이 GPIO 및 센서 활용하기: 1. GPIO(General Purpose Input Output) 제어 및 테스트, 2. PWM(Pulse Width Modulation) 제어 [K-디지털 트레이닝 45일] 본문
[45] 230303 Ch. 5 라즈베리파이 GPIO 및 센서 활용하기: 1. GPIO(General Purpose Input Output) 제어 및 테스트, 2. PWM(Pulse Width Modulation) 제어 [K-디지털 트레이닝 45일]
yjyuwisely 2023. 3. 3. 12:45230303 Fri 45th class
Ch. 5 라즈베리파이 GPIO 및 센서 활용하기
진도: p. 126 ~ (교재: IoT 사물인터넷을 위한 라즈베리파이 4 정석, 저자: 최주호 , 김재범 , 정동진)
교재 코드 깃허브: https://github.com/codingspecialist/RaspberryPi4-Book-Example
교재 소스 및 PPT: http://jspstudy.co.kr/main/main.jsp
저자 카페: https://cafe.naver.com/metacoding
IoT 사물인터넷을 위한 라즈베리파이 4 정석 | 최주호 - 교보문고
IoT 사물인터넷을 위한 라즈베리파이 4 정석 | 『IoT 사물인터넷을 위한 라즈베리파이 4 정석』은 왕초보도 라즈베리파이를 이용해 다양한 IoT를 직접 개발할 수 있도록 전기전자 기초 원리부터 센
product.kyobobook.co.kr
오늘 배운 것 중 기억할 것을 정리했다.
본문의 파이썬 코드 순서
[1] LED.Blink.py p. 129 : LED 10번 깜빡임
[2] Btn_Polling.py p. 131 : 버튼 누르면 계속 메시지 출력
[3] Btn_Event.py p. 132 - p. 133 : 버튼 계속 누르고 있어도 메시지 1번 출력
[4] Btn_LED.py p. 135 : 버튼 누를 때마다 LED 켜지고 꺼짐 반복
| 파이썬 코드 이름 | 설명 |
| LED_Blick | LED 10번 깜빡인다. |
| Btn_Pollling | 버튼 누르고 있으면 계속해서 'Button pushed!' 메시지가 출력된다. |
| Btn_Event | 버튼을 계속 누르고 있어도 메시지가 한번만 출력된다. |
| Btn_LED | 버튼을 누를 때마다 LED 켜지고 꺼짐을 반복한다. |
Chapter 05 라즈베리 파이 GPIO 및 센서 활용하기
책의 목차
01 _ GPIO 제어 및 테스트
01-1 LED 실습
01-2 푸시 버튼 스위치 실습(Polling 방식)
01-3 푸시 버튼 스위치 실습(Event 알림 방식)
01-4 푸시 버튼 입력으로 LED 실습
02 _ PWM 제어
02-1 PWM으로 LED 실습
02-2 PWM으로 부저 실습
02-3 PWM으로 서보모터 실습
03 _ 초음파센서(HC-SR04) 실습
04 _ PIR 센서(HC-SR501) 실습
05 _ 아날로그 신호와 SPI 통신
05-1 아날로그 신호를 라즈베리 파이로 읽어오기
05-2 SPI 통신의 이해
05-3 SPI 라즈베리 파이에서 설정하기
05-4 아날로그 전압을 MCP3008로 읽어오기
05-5 LDR 센서 실습
05-6 조이스틱(Joystick) 실습
06 _ I2C 통신
06-1 I2C 라즈베리 파이에서 설정하기
06-2 BMP180(대기압 센서) 실습
06-3 OLED 디스플레이 실습
1. GPIO(General Purpose Input Output) 제어 및 테스트
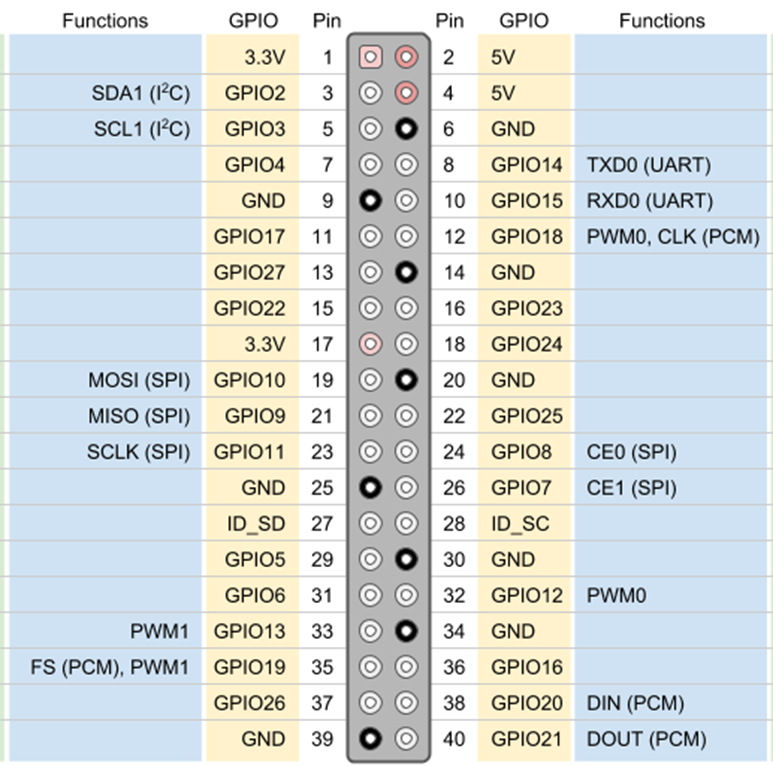

라즈베리 파이의 2열의 헤더 핀들은 위의 그림과 같은 핀 배열을 가진다.
GPIO(General Purpose Input Output): 마이크로프로세서가 주변장치와 통신하기 위해 범용으로 사용되는 입출력(I/O) 포트이다.
포트: 전기적 신호 데이터가 오가는 통로
핀번호 읽는 법
1. Board(물리적인 핀 번호):
왼쪽 위쪽부터 1로 시작
오른쪽 아래 40번 핀
2. BCM(프로그램 가능한 핀 번호):
GPIO + 숫자
3. 특수기능(Functions)
GPIO 기능 외에 특수기능 가능
GND => 그라운드 ( - )
5V => 5V 전원 ( + )
3.3V => 3.3V 전원 ( + )
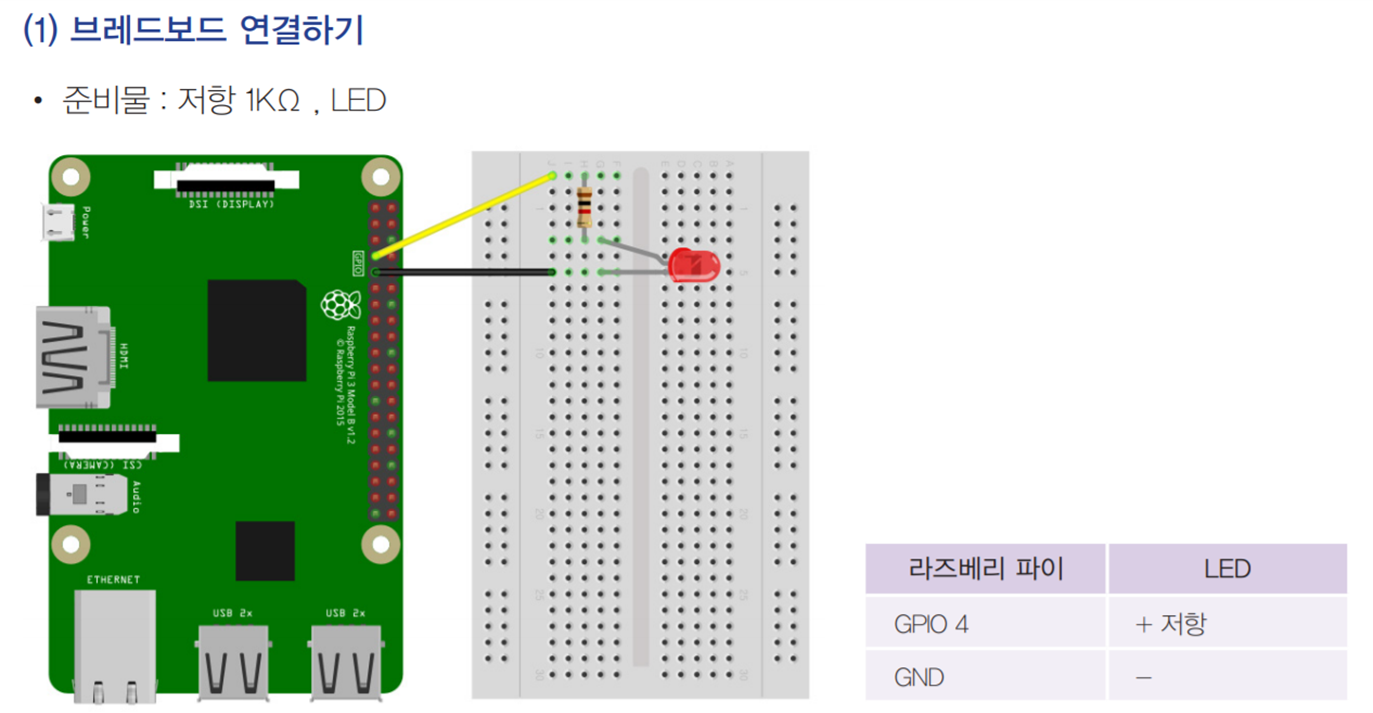
1.1 LED 실습
(1) 브레드보드 연결하기
(2) 파이썬 프로그래밍 준비하기
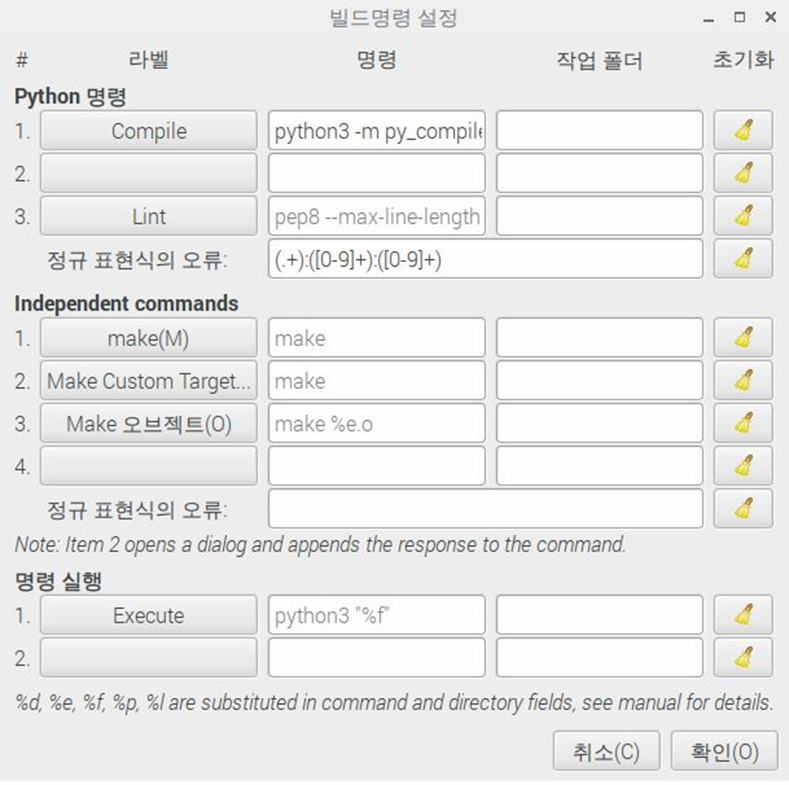
(2.1) 지니(Geany) 프로그램 설정
지니: 통합개발환경(IDE, Integrated Development Environment)으로 파이썬으로 스크립트를 작성하고 프로그램까지 실행할 수 있다.
메뉴 => 제작 => 빌드 설정
(2.2) RPi.GPIO 라이브러리 사용법
- 한글주석을 위해 코드의 최상단에 “#-*- coding: utf-8 -*-”를 추가한다.

- 모듈 불러오기
하드웨어를 제어하기 위해 RPI.GPIO 모듈과 LED 켜고 끄는 시간을 설정하기 위해 time 모듈을 불러온다.
GPIO 핀번호 모드 설정 ( 물리번호, BCM )
BOARD 모드: 2열 헤더 핀의 번호를 순서대로 나열한다.
BCM 모드: 약속된 GPIO 번호로 표시한다.
GPIO 핀을 출력으로 사용할 것인지 입력으로 사용할 것인지 먼저 설정
사용하고자 하는 GPIO 채널을 출력으로 설정한다.

GPIO 모드를 out으로 설정한 이후에 다음을 사용한다.
GPIO.output(channel, 1) => High(3, 3V)를 출력한다.
GPIO.output(channel, 0) => LOW(0V)를 출력한다.time 모듈에서 1초간 시간을 대기하는 time.sleep(1)을 사용하여 1초간 대기 상태로 만든다.
Time.sleep(1)(2.3) 파이썬 실행 버전 설정하기
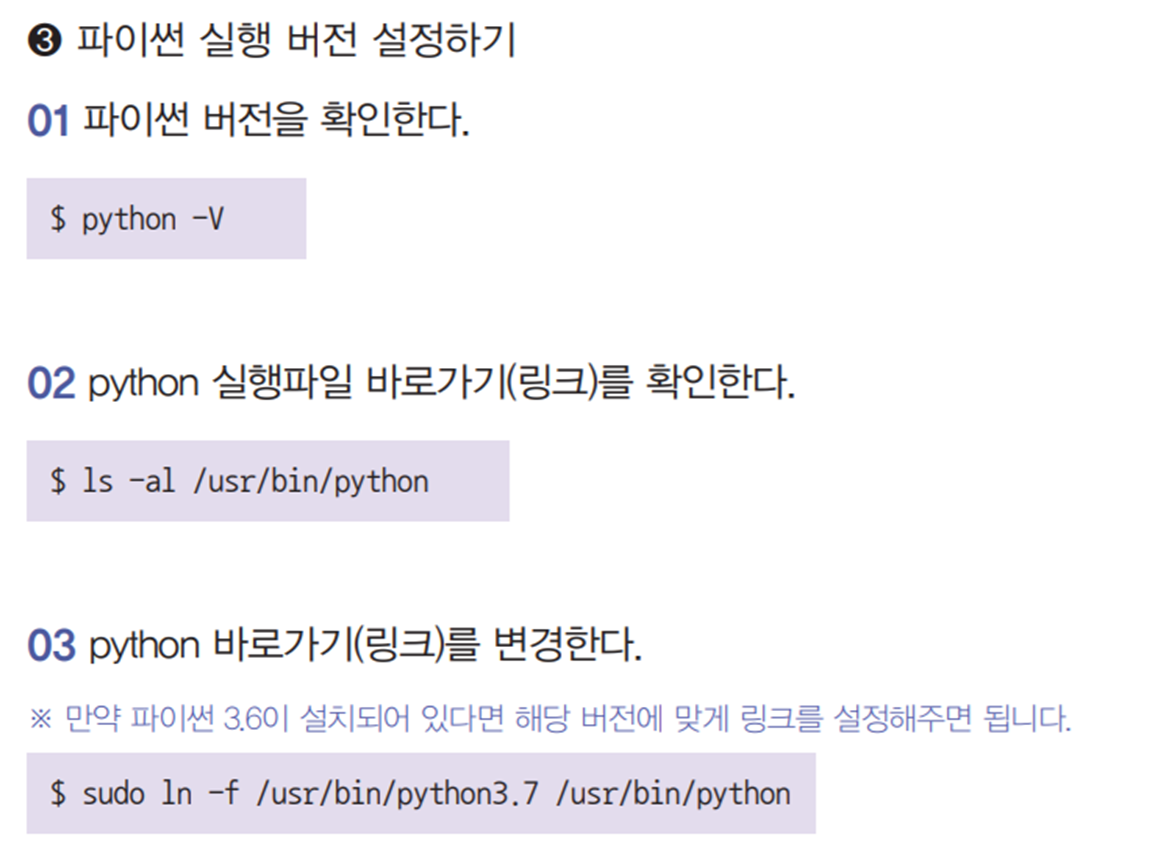
(3) 파이썬 코드 작성하기
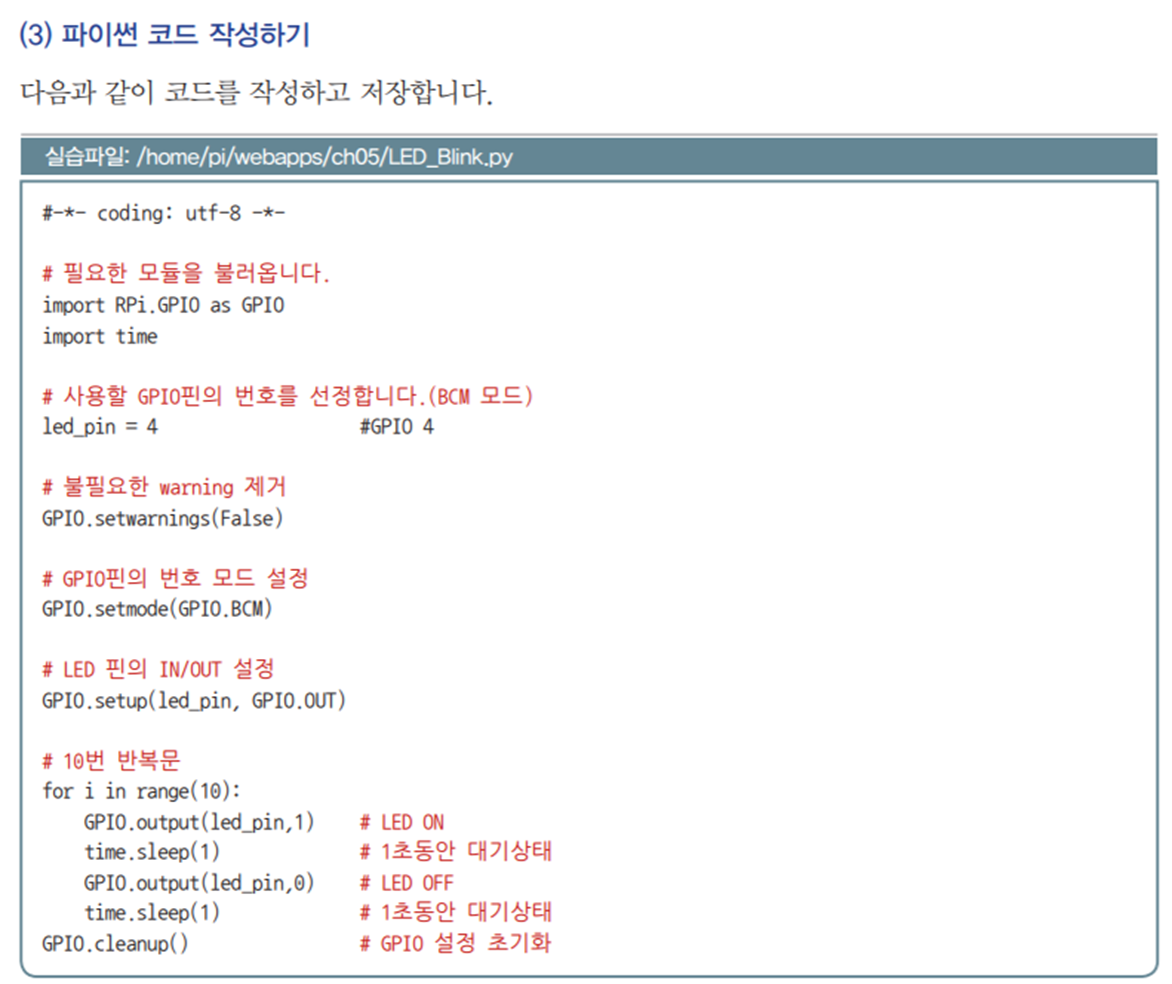
[1] LED_Blink.py p. 129
# -*- coding: utf-8 -*-
#필요한 모듈을 불러옵니다.
import RPi.GPIO as GP10
import time
#사용할 GPIO핀의 번호를 선정한다.(BCM 모드)
led_pin = 4 #GPIO 4
#불필요한 warning 제거
GPIO.setwarnings(False)
#GPIO핀의 번호 모드 설정
GPIO.setmode(GPIO.BCM)
#LED핀의 IN/OUT 설정
GPIO.setup(led_pin, GPIO.OUT)
#10번 반복문
for i in range(10):
GPIO.output(led_pin, 1) #LED ON
time.sleep(1) #1초동안 대기상태
GPIO.output(led_pin, 0) #LED OFF
time.sleep(1) #1초동안 대기상태
GPIO.cleanup() #GPIO 설정 초기화코드 마지막에 GPIO.cleanup()은 스크립트 실행 시에 GPIO 모드 세팅 등을 초기화하고 리스트를 반환시켜서 중복 사용이나 GPIO핀 쇼트 등의 하드웨어적인 문제를 방지할 수 있다.
쇼트: 접촉되면 안되는 두 도체, 즉 서로간의 부하가 거의 없는 상태에서 전류적으로 접촉되는 현상을 말하는 것으로 쇼트가 나면 의도치않은 과전류가 흐르게 되고 그 막대한 전기 에너지가 발산하는 발열로 인해 화재가 일어날 수도 있는 현상이다.
P = VI, P: 전력, V: 전압, I: 전류
(4) 코드 실행하기
LED가 10회 깜빡인다.
1.2 푸시 버튼 스위치 실습(Polling 방식) p. 130
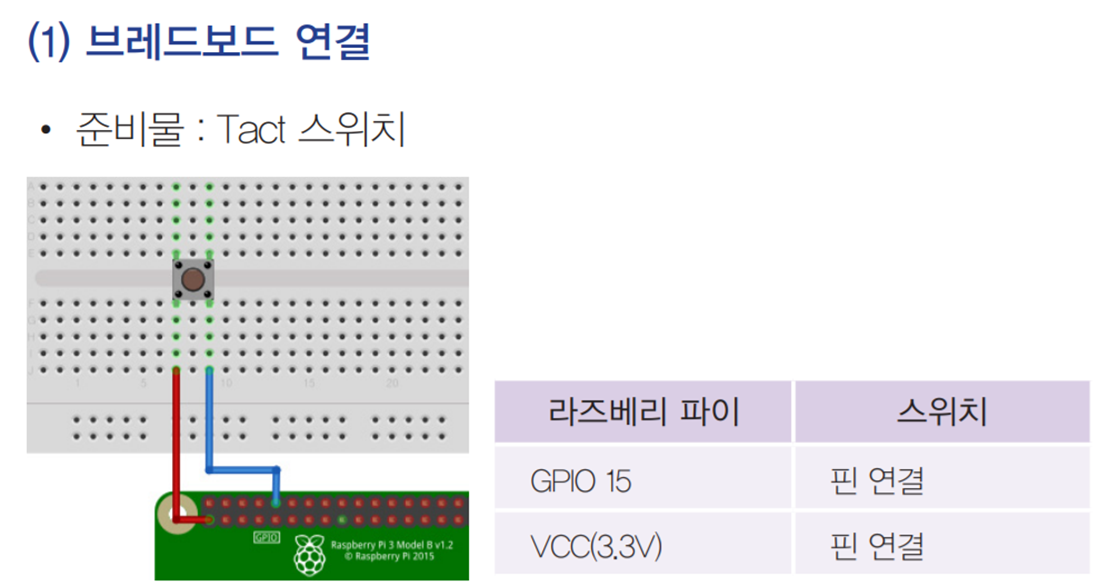
푸시 버튼을 누르지 않았을 때는 GPIO 핀은 플로팅(Floating: 연결 X) 상태가 되기 때문에 알 수 없다.
이를 방지하기 위해 Pull up/down 하여 초기상태를 명확하게 해야 한다. (라즈베리 파이에서는 내부적으로 세팅할 수 있다.)
(2) RPI.GPIO 라이브러리 사용법
GPIO 핀을 입력하고 Pull up/down을 설정한다.
GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_UP) #=> 풀업 설정
GPIO.setup(channel, GPIO.IN, pull_up_down=GPIO.PUD_DOWN) #=> 풀다운 설정브레드보드 연결에서 스위치의 한쪽을 3.3V(1)에 연결했으므로 PUD_DOWN으로 설정한다.
GPIO 핀의 입력상태를 체크하는 if문을 작성한다.
if GPIO.input(channel) == GPIO.HIGH:
print('HIGH)
else:
print('LOW')if문의 GPIO.HIGH는 1과 같다.
즉 입력핀에 3.3V 입력이 있으면 라즈베리 파이에서는 디지털 1로 받아들여서 HIGH(1)를 출력하고
아닐시에는 LOW(0)을 출력한다.
(3) 파이썬 코드 작성하기
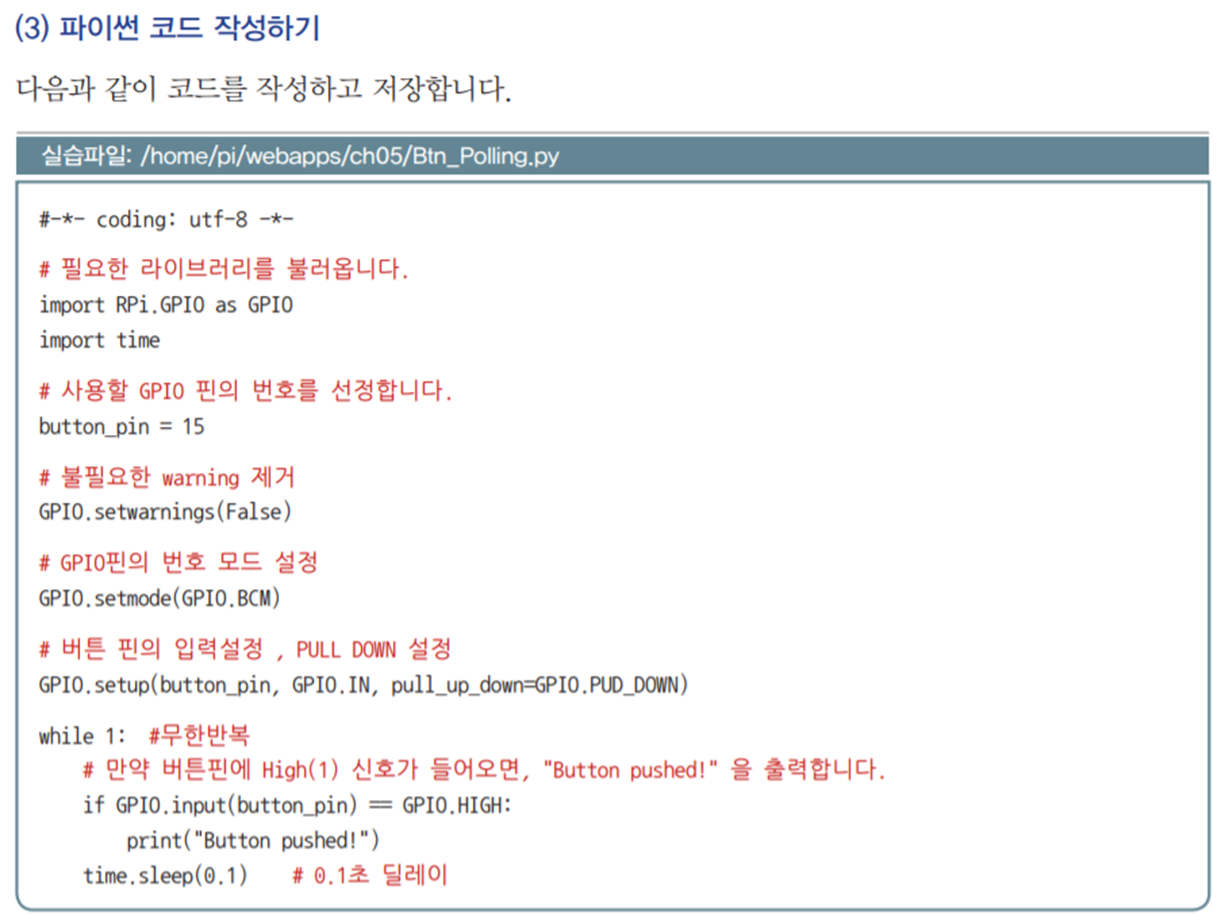
[2] Btn_Polling.py p. 131 - p. 132
# -*- coding: utf-8 -*-
#필요한 라이브러리를 불러옵니다.
import RPi.GPIO as GP10
import time
#사용할 GPIO핀의 번호를 선정합니다.
button_pin = 15
#불필요한 warning 제거
GPIO.setwarnings(False)
#GPIO핀의 번호 모드 설정
GPIO.setmode(GPIO.BCM)
#버튼 핀의 입력 설정 , PULL DOWN 설정
GPIO.setup(button_pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
while 1: #무한반복
#만약 버튼핀에 High(1) 신호가 들어오면, "Button pushed!"을 출력합니다.
if GPIO.input(button_pin) == GPIO.HIGH:
print("Button pushed!")
time.sleep(0.1) #0.1초 딜레이위의 무한반복문을 보면 계속해서 0.1초 간격으로 GPIO 버튼 핀을 확인해서 눌러졌으면 "Button pushed"를 출력한다.
폴링(Polling): 이렇게 계속해서 입력을 확인하는 처리방식
폴링방식의 입력에서는 버튼을 누르고 있으면 계속해서 'Button pushed!' 메시지가 출력된다.
대기 상태나 다른 작업을 하는 상황이라면 입력버튼을 눌러도 확인할 수 없다. (=> 이벤트 알림 방식의 처리방법도 알아본다.)
1.3 푸시 버튼 스위치 실습(Event 알림 방식) p. 132
def button_callback(channel):
print("Button pushed!")이 함수는 실행시 “Button pushed!” 문자열을 출력한다.
(2) 파이썬 코드 작성하기 p. 132 - p. 133
[3] Btn_Event.py
#-*-coding:utf-8-*-
# 필요한 라이브러리를 불러옵니다.
import RPi.GPIO as GPIO
import time
# button_callback 함수를 정의합니다.
def button_callback(channel):
print("Button pushed!")
# 사용할 GPIO핀의 번호를 선정합니다.
button_pin = 15
# GPIO핀의 번호 모드 설정
GPIO.setmode(GPIO.BCM)
# 버튼 핀의 IN/OUT 설정 , PULL DOWN 설정
GPIO.setup(button_pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
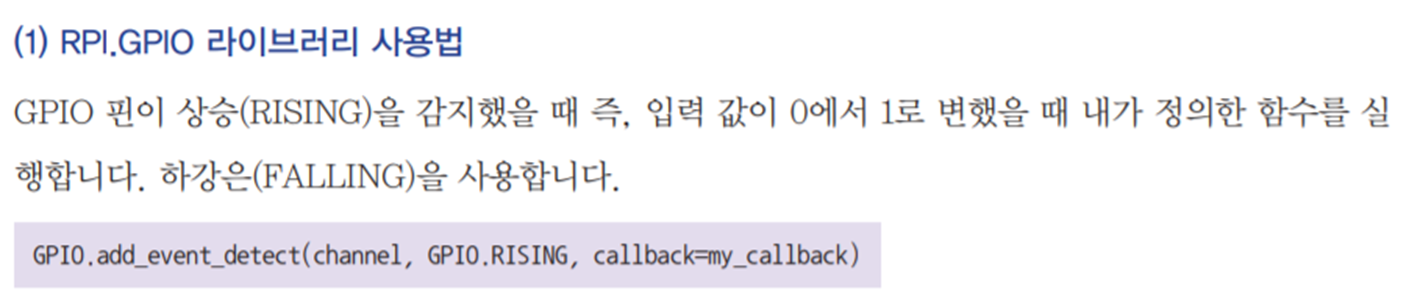
# Event 방식으로 핀의 Rising 신호를 감지하면 button_callback 함수를 실행합니다.
GPIO.add_event_detect(button_pin,GPIO.RISING,callback=button_callback)
while 1:
time.sleep(0.1) # 0.1초 딜레이위의 무한반복문을 보면 계속 0.1초의 대기시간을 반복하지만 Event 방식의 신호 감지 시 미리 정의한 button_callback 함수를 실행해 준다. (=> 폴링 방식과는 다르게 입력 신호가 들어올 때 원하는 동작을 할 수 있다.)
(3) 코드 실행하기
버튼을 계속 누르고 있어도 메시지가 한번만 출력된다.
입력 신호가 0에서 1로 변화하는 순간만을 감지하기 때문에 버튼에 손을 떼고 다시 누르지 않는 이상 여러번 메시지를 출력하지 않는다.
1.4 푸시 버튼 입력으로 LED 실습 p. 133
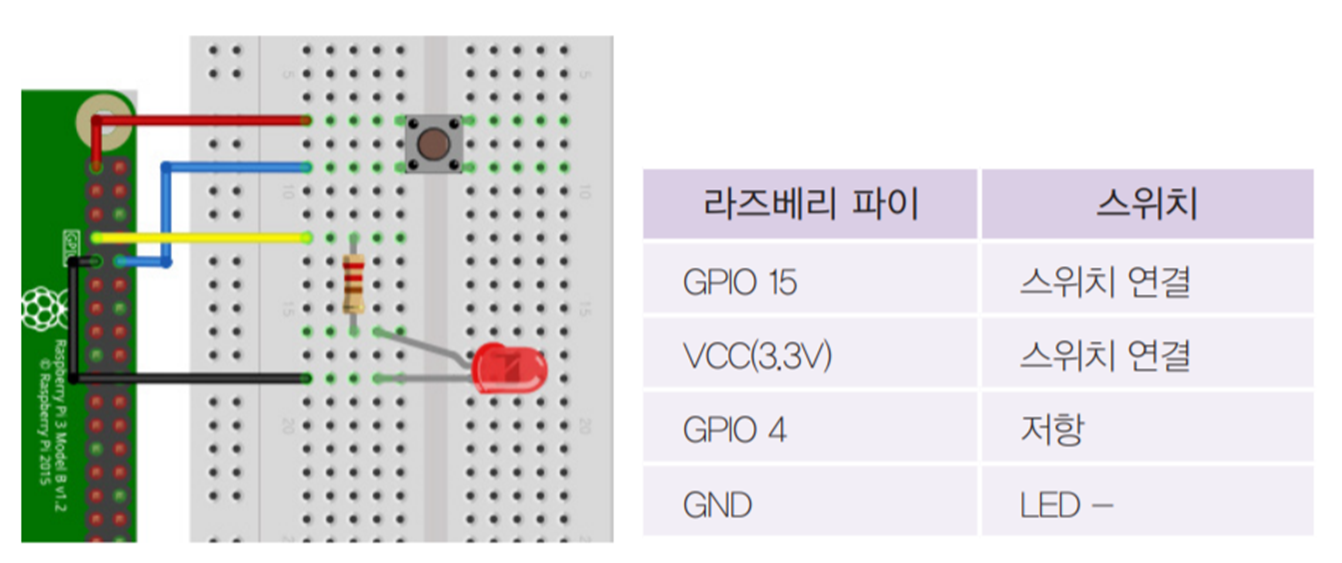
(2) 파이썬 코드 작성과 실행하기 p. 135
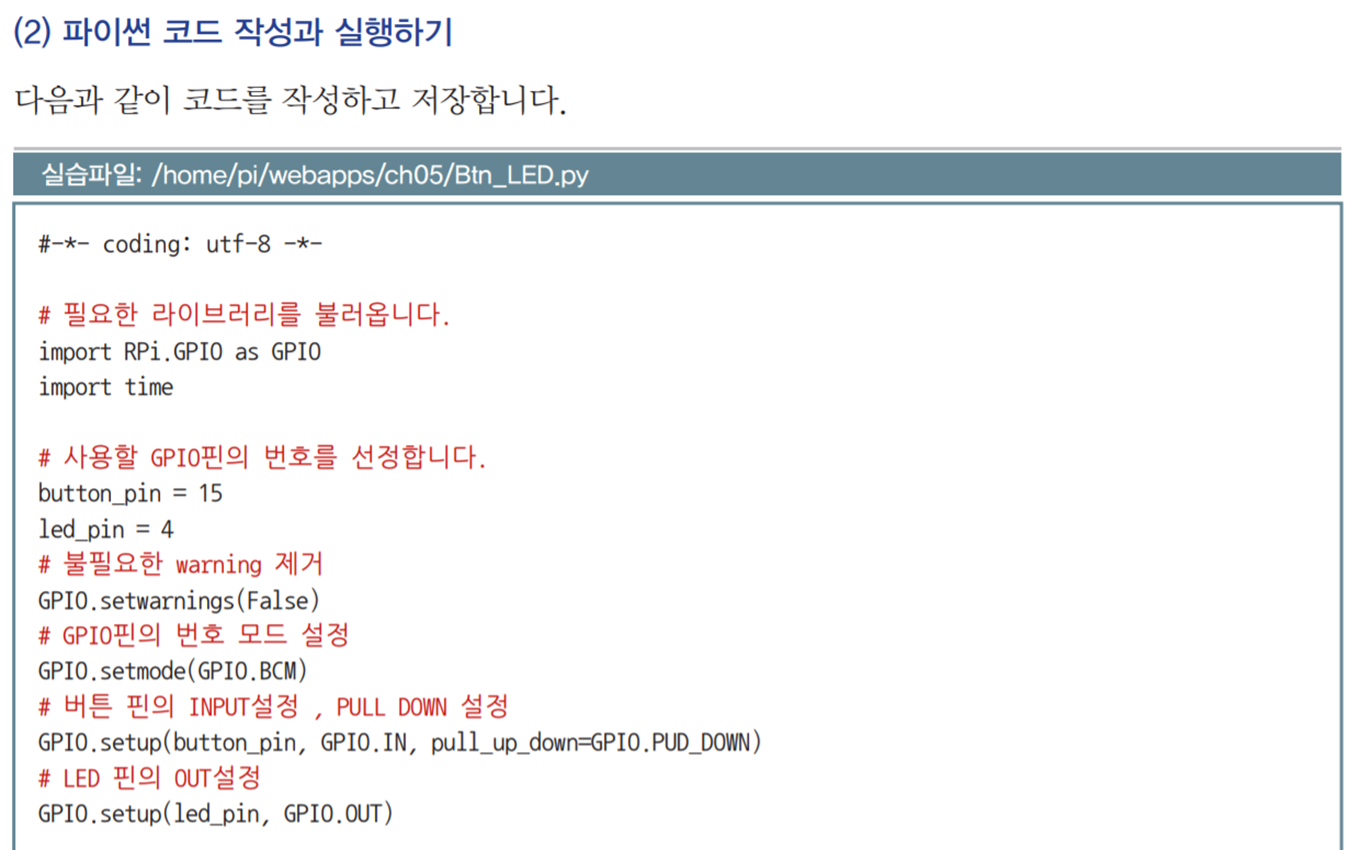

[4] Btn_LED.py p. 135
#-*-coding:utf-8-*-
# 필요한 라이브러리를 불러옵니다.
import RPi.GPIO as GPIO
import time
# 사용할 GPIO핀의 번호를 선정합니다.
button_pin = 15
led_pin = 4
#불필요한 warning 제거
GPIO.setwarnings(False)
# GPIO핀의 번호 모드 설정
GPIO.setmode(GPIO.BCM)
# 버튼 핀의 IN/OUT 설정 , PULL DOWN 설정
GPIO.setup(button_pin, GPIO.IN, pull_up_down=GPIO.PUD_DOWN)
#LED 핀의 OUT설정
GPIO.setup(led_pin, GPIO.OUT)
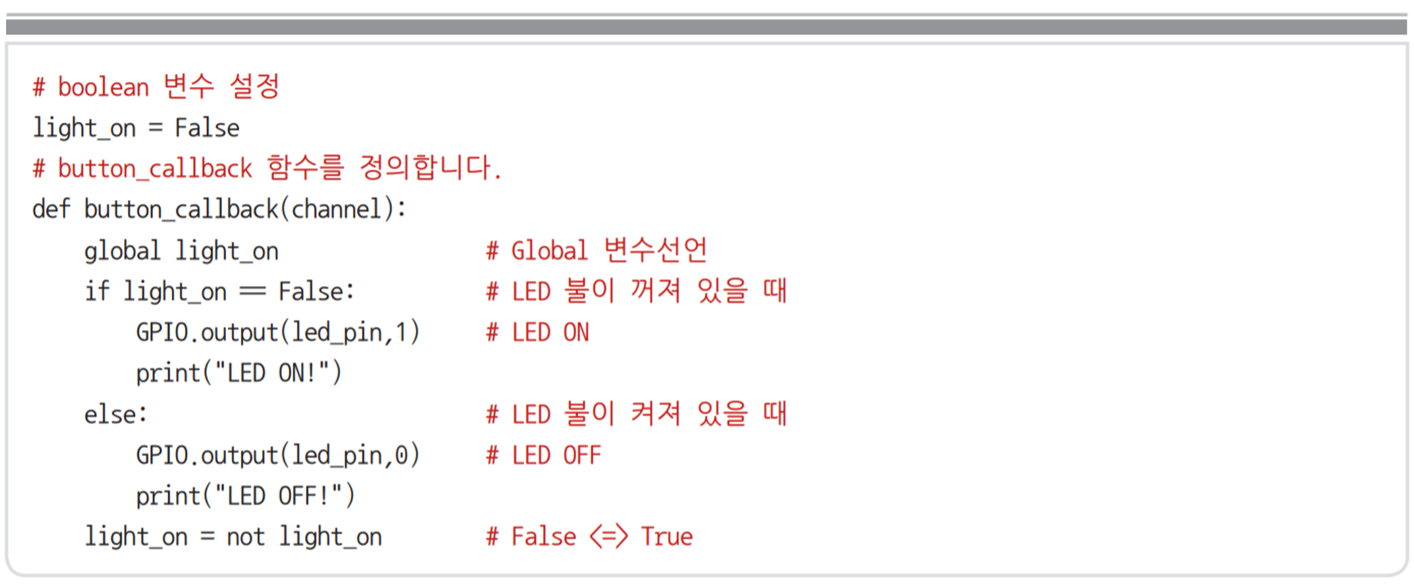
#boolean 변수 설정
light_on = False
#button_callback 함수를 정의한다.
def button_callback(channel):
global light_on #Global 변수 선언
if light_on == False: #LED 불이 꺼져있을 때
GPIO.output(led_pin,1) #LED ON
print("LED ON!")
else: #LED 불이 켜져있을 때
GPIO.output(led_pin,0) #LED OFF
print("LED OFF!")
light_on = not light_on #False <=> True
#Event 알림 방식으로 GPIO 핀의 Rising 신호를 감지하면 button_callback 함수를 실행한다.
#300ms 바운스 타임을 설정하여 잘못된 신호를 방지한다.
GPIO.add_event_detect(button_pin, GPIO.RISING, callback=button_callback, bouncetime=300)
while 1:
time.sleep(0.1) #0.1초 딜레이global: 파이썬에서 전역 변수
버튼을 누를 때마다 LED가 켜지고 꺼짐을 반복한다.
2. PWM(Pulse Width Modulation) 제어
Duty비란 주기를 가지는 Pulse에서 쓰이는 용어이다. 일반적으로 Duty비라고 하면 On Duty Ratio를 가리키는 경우가 대부분인데, 이는 한 주기에 대해서 펄스가 On 상태인 시간의 비율을 뜻한다.

2.1 PWM(Pulse Width Modulation) 으로 LED 실습





[1] PWM_LED.py p. 137 - p. 138
#-*-coding:utf-8-*-
# 필요한 라이브러리를 불러옵니다.
import RPi.GPIO as GPIO
import time
#불필요한 warning 제거, GPIO핀의 번호 모드 설정
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
#GPIO 18번 핀을 출력으로 설정
GPIO.setup(18, GPIO.OUT)
#PWM 인스턴스 p를 만들고 GPIO 18번을 PWM 핀으로 설정, 주파수 = 50Hz
p = GPIO.PWM(18, 50)
#LED 핀의 OUT설정
GPIO.setup(led_pin, GPIO.OUT)
p.start(0) #PWM 시작, 듀티비 = 0
try:
while 1: #무한 반복
for dc in range(0, 101, 5): #밝기가 0부터 5씩 100이 될 동안
p.ChangeDutyCycle(dc)
time.sleep(0.1)
for dc in range(100, -1, 5): #밝기가 100부터 5씩 0이 될 동안
p.ChangeDutyCycle(dc)
time.sleep(0.1)
except KeyboardInterrupt: #키보드 CTRL+C 눌렀을 때 예외발생
pass #무한반복을 빠져나와 아래의 코드를 실행한다.
p.stop() #PWM을 종료한다.
GPIO.cleanup() #GPIO 설정을 초기화한다.2.2 PWM(Pulse Width Modulation) 으로 부저 실습

부저의 종류


(2) Python 코드 작성하기
4옥타브 “도 레 미 파 솔 라 시”와 5옥타브 도까지 주파수

[2] PWM_Buzzer.py p. 140 - p. 141
실습파일: /home/pi/webapps/ch05/PWM_Buzzer.py
#-*-coding:utf-8-*-
# 필요한 라이브러리를 불러옵니다.
import RPi.GPIO as GPIO
import time
# 불필요한 warning 제거, GPIO핀의 번호 모드 설정
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
# GPIO 18번 핀을 출력으로 설정
GPIO.setup(18, GPIO.OUT)
# PWM 인스턴스 p를 만들고 GPIO 18번을 PWM 핀으로 설정, 주파수 = 100Hz
p = GPIO.PWM(18, 100)
# 4옥타브 도~시 , 5옥타브 도의 주파수
Frq = [ 262, 294, 330, 349, 392, 440, 493, 523 ]
speed = 0.5 # 음과 음 사이 연주시간 설정 (0.5초)
p.start(10) # PWM 시작 , 듀티사이클 10 (충분)
try:
while 1:
for fr in Frq:
p.ChangeFrequency(fr) #주파수를 fr로 변경
time.sleep(speed) #speed 초만큼 딜레이 (0.5s)
except KeyboardInterrupt: # 키보드 Ctrl+C 눌렀을때 예외발생
pass # 무한반복을 빠져나와 아래의 코드를 실행
p.stop() # PWM을 종료
GPIO.cleanup() # GPIO 설정을 초기화2.3 PWM(Pulse Width Modulation)으로 서보모터 실습




[3] PWM_Servo.py p. 142 - p. 143
#-*- coding: utf-8 -*-
#필요한 라이브러리를 불러옵니다.
import RPi.GPIO as GPIO
import time
#서보모터를 PWM으로 제어할 핀 번호 설정
SERVO_PIN = 18
#불필요한 warning 제거
GPIO.setwarnings(False)
#GPIO핀의 번호 모드 설정
GPIO.setmode(GPIO.BCM)
#서보핀의 출력 설정
GPIO.setup(SERVO_PIN, GPIO.OUT)
#PWM 인스턴스 servo 생성, 주파수 50으로 설정
servo = GPIO.PWM(SERVO_PIN, 50)
#PWM 듀티비 0으로 시작
servo.start(0)
try:
while True:
#듀티비를 변경하여 서보모터를 원하는 만큼 움직임
servo.ChangeDutyCycle(7.5) #90도
time.sleep(1)
servo.ChangeDutyCycle(12.5) #180도
time.sleep(1)
servo.ChangeDutyCycle(2.5) #0도
time.sleep(1)
except KeyboardInterrupt:
servo.stop()
GPIO.cleanup()